BlueGene
Themenersteller
Hallo,
hiermit will ich euch mal meinen vollautomatisierten Panoramakopf für Timelapseaufnahmen vorstellen")
Und bitte nicht wundern: Der Aufbau entspricht fast 1:1 dem Emotimo, dieser war sozusagen meine Vorlage.
Das Projekt habe ich komplett selbstständig durchgeführt, d.h. Mechanik, Elektronik und das Programm für die Ansteuerung sind alles von mir.
Zunächst einmal ein kurzes Beispielvideo, bei dem der Panoramakopf zum Einsatz kam:
https://vimeo.com/66001313
--------------------------------------------
Und hier noch paar Infos zum Aufbau:
- Schrittmotoren werden in 1/16-Schritten bewegt
- 1:50 Schneckengetriebe ist selbsthemmend (d.h. wenn die Motoren ausfallen, stürzt mir die Kamera nicht ab, sondern bleibt einfach dort wo sie ist)
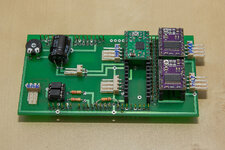
- Steuerung übernimmt ein Arduino MEGA 2560
- 7,4V-Wandler ermöglicht das Betreiben der Kamera mit dem 12V-Akkus (der Wandler ist in der kleinen Box, damit ich unabhängig vom Controller bin, sofern ich die Kamera mal ohne Panoramakopf mit dem 12V-Akkus betreiben möchte)
- 2 x 12V 9000mAh Akkus (1 Akku für den Arduino und die Kamerastromversorgung, 1 Akku für die Stromversorgung der Motoren)
- Kameraauslösung über Optokoppler
- Auflösung pro Achse: 0,00225°
- 3 Modi: Kontinuierliche Bewegung, Timelapse (Shot-move-Shot) und Panoramabilder
- Bewegung erfolgt in "sanften Kurven", d.h. ich fahre manuell die Startposition, 3 Zwischenpunkte und die Endposition an. Das Programm verbindet dann die 5 Punkte mit Splines
Und noch was zur Planung/Fertigung:
- Zu Beginn wurde ein komplettes CAD-3D-Model erstellt
- Aluteile wurden bereits fertig zugeschnitten bestellt
- Bohrungen erfolgten mit einer üblichen Bohrmaschine und Bohrmaschinenhalterung (hab leider keine Werkstatt zur Verfügung)
Weitere Achsen(wie z.B. für einen Slider, Zoom oder Fokus) sind einfach zu ergänzen. Hab´s aber bisher nur mit meinen Slider ausprobiert und werde es beim nächsten Umbau endgültig in den Controller integrieren.
Freue mich über Kommentare, Fragen und Verbesserungsvorschläge
hiermit will ich euch mal meinen vollautomatisierten Panoramakopf für Timelapseaufnahmen vorstellen
Und bitte nicht wundern: Der Aufbau entspricht fast 1:1 dem Emotimo, dieser war sozusagen meine Vorlage.
Das Projekt habe ich komplett selbstständig durchgeführt, d.h. Mechanik, Elektronik und das Programm für die Ansteuerung sind alles von mir.
Zunächst einmal ein kurzes Beispielvideo, bei dem der Panoramakopf zum Einsatz kam:
https://vimeo.com/66001313
--------------------------------------------
Und hier noch paar Infos zum Aufbau:
- Schrittmotoren werden in 1/16-Schritten bewegt
- 1:50 Schneckengetriebe ist selbsthemmend (d.h. wenn die Motoren ausfallen, stürzt mir die Kamera nicht ab, sondern bleibt einfach dort wo sie ist)
- Steuerung übernimmt ein Arduino MEGA 2560
- 7,4V-Wandler ermöglicht das Betreiben der Kamera mit dem 12V-Akkus (der Wandler ist in der kleinen Box, damit ich unabhängig vom Controller bin, sofern ich die Kamera mal ohne Panoramakopf mit dem 12V-Akkus betreiben möchte)
- 2 x 12V 9000mAh Akkus (1 Akku für den Arduino und die Kamerastromversorgung, 1 Akku für die Stromversorgung der Motoren)
- Kameraauslösung über Optokoppler
- Auflösung pro Achse: 0,00225°
- 3 Modi: Kontinuierliche Bewegung, Timelapse (Shot-move-Shot) und Panoramabilder
- Bewegung erfolgt in "sanften Kurven", d.h. ich fahre manuell die Startposition, 3 Zwischenpunkte und die Endposition an. Das Programm verbindet dann die 5 Punkte mit Splines
Und noch was zur Planung/Fertigung:
- Zu Beginn wurde ein komplettes CAD-3D-Model erstellt
- Aluteile wurden bereits fertig zugeschnitten bestellt
- Bohrungen erfolgten mit einer üblichen Bohrmaschine und Bohrmaschinenhalterung (hab leider keine Werkstatt zur Verfügung)
Weitere Achsen(wie z.B. für einen Slider, Zoom oder Fokus) sind einfach zu ergänzen. Hab´s aber bisher nur mit meinen Slider ausprobiert und werde es beim nächsten Umbau endgültig in den Controller integrieren.
Freue mich über Kommentare, Fragen und Verbesserungsvorschläge
Anhänge
-
 Exif-Daten01.JPG29,6 KB · Aufrufe: 533
Exif-Daten01.JPG29,6 KB · Aufrufe: 533 -
 Exif-Daten02.JPG44,8 KB · Aufrufe: 406
Exif-Daten02.JPG44,8 KB · Aufrufe: 406 -
 Exif-DatenIMG_5792.jpg195,9 KB · Aufrufe: 810
Exif-DatenIMG_5792.jpg195,9 KB · Aufrufe: 810 -
 Exif-DatenIMG_5793.jpg204,4 KB · Aufrufe: 587
Exif-DatenIMG_5793.jpg204,4 KB · Aufrufe: 587 -
 Exif-Daten2013-05-12 17.00.50.jpg210,4 KB · Aufrufe: 921
Exif-Daten2013-05-12 17.00.50.jpg210,4 KB · Aufrufe: 921




")