zuberjo89
Themenersteller
Nachdem das alte Projekt abgeschlossen war und ich relativ lange damit zufrieden war, kamen nach und nach doch immer mehr Überlegungen zu Verbesserungen. Was mich beim alten Slider etwas stört ist, dass die Steuerung nur mit 12 Volt läuft und damit als einfacher Intervallauslöser ohne Slider zu schwer und unhandlich ist. Die Funktionen wie zB der Bulbmodus oder der Intervallometer ohne Fahrt wurden dadurch nie genutzt. Zusätzlich hat es mich trotz der anfänglichen Euphorie immer mehr gestört, dass eine Steuerung nur über das Handy lief. Daher kam eine immer längere Liste mit Änderungswünschen, die nun nach und nach Gestalt annehmen. Die Features im Überblick
Der Controller:
- Ein Controller basierend auf einem ESP32 mit 0.96 Zoll Oled Display, betrieben mit einem 1800 mAh Akku. Die alte Steuerung lief mit einem ESP8266. Der ist noch immer ok und wäre vermutlich auch mehr als ausreichend für die Steuerung gewesen. Aber da ich beim Slider wegen der höheren Rechenleistung einen ESP32 verwende, wollte ich keine zwei verschiedene Microcontroller verwenden. Zusätzlich gibt es ein paar tolle Vorteile: Der ESP32 ist ein Dualcor Controller. Ich habe das Programm so geschrieben, dass alle Nutzereingaben, WiFi und das Display in einem Thread und das eigentliche Programm in einem anderen Thread läuft. Dies hat unglaubliche Performancevorteile
- Die Eingabe der Parameter läuft direkt per Drehencoder (Drehrad mit Taster) - Der Akku kann direkt und ohne Ausbau per mUSB geladen werden, eine Ladeschutzschaltung ist auf der Platine integriert
- Die Kamera kann nach wie vor per IR oder per Kabel ausgelöst werden. Gegenüber der alten Steuerung ist ein zusätzlicher Schaltkreis für das Fokussignal integriert. Ohne gibt es gerade bei meinen Olympus Kameras Probleme. Ein Mechanischer Taster für die Auslösung wie bei einem Kabelfernauslöser ist im Gehäuse integriert
- Alles ist mit 8x4x2,5 cm sehr kompakt und problemlos zu transportieren
Der Slider:
- Er hat eine eigene Platine mit einem ESP32. Dieser empfängt nur Instruktionen vom Controller und führt diese aus
- Zwei Schrittmotortreiber sind auf dem Board untergebracht
- Die Slidersteuerung läuft weiterhin mit 12 Volt wegen den Schrittmotoren. Da die Steuerung für den Slider aber physisch unabhängig ist vom eigentlichen Controller kann diese fix am Slider untergebracht werden und die Größe stört dort nicht mehr
So, das war mal ein grober Überblick. Nun zu den Details: Der Controller läuft ja mit einem 1800 mAh Akku. Schaltet man ihn ein hat man zwei Menüpunkte zur Auswahl:
- "Auslösung". In "Auslösung" ist der Bulbmodus (mit einstellbarer Zeit in Sekunden und ein freier Bulbmodus) und der Intervallauslöser auswählbar
- "Einstellungen". In "Einstellungen" kann man das IR Signal nach Hersteller auswählen und ein paar Einstellungen bezüglich den Schrittmotoren. Diese werden aber nur relevant wenn man den Controller verbindet. Das funktioniert folgendermaßen: Man schaltet den Slider ein. Der Controller des Sliders stellt automatisch einen Art Accespoint zur verfügung. Aktiviert man nun in den Einstellungen des eigentlichen Controllers die Option "WiFi", so verbindet sich dieser mit dem Slider. Ab dem Zeitpunkt werden zusätzliche Menüpunkte freigeschaltet:
- "Timelapse": Hier kann man nun die Schrittweite in mm Eingeben, die Rotation in 1/10 Grad Schritten, die maximale Auslösungszeit und das Intervall. Startet man das Programm läuf alles folgendermaßen ab: Es wird ein Bild geschossen und der Controller wartet die eingestellte maximale Auslösezeit ab. Danach wird dem Slider geschickt was er tun soll und dann die restliche Zeit zur eingestellten Intervallzeit abgewartet. Danach wird das nächste Bild ausgelöst und alles geht so weiter
- "Fahrt": Hier kann man eine lineare und eine Rotationsgeschwindigkeit einstellen und diese aktivieren. Interessant für Filmaufnahmen
- "Astro": Der Modus bleibt, auch wenn er bei der ersten Version Nicht ganz perfekt läuft. Man kann damit die Rotationsachse in der Geschwindigkeit laufen lassen um die Erdrotation auszugleichen. Das Problem ist, dass die Ausrichtung lange nicht so gut klappt wie mit dem dafür ausgelegten Skywatcher. Zusätzlich trifft man je nach Untersetzung und Schrittweiten die Geschwindigkeit der Erde nicht ganz exakt. Aber rund 5 Minuten Belichtungszeit bei 15 mm Brennweit @ FF ist machbar. Als kleines Gimmick voll in Ordnung
Weiter in den Details. Ich habe geschrieben "eine Art WiFi Accespoint". Die Kommunikation zwischen den beiden ESPs läuft per ESP Now. Ich hatte erst überlegungen es wieder mit einem http Server zu lösen. Allerdings hat http viel Overhead: 26 byte Ethernet 20 byte TCP, 20 byte IP und durch den dreifach Handshake (PSH,Ack,Ack) vergeht auch relativ viel Zeit. Eine Alternative wäre MQTT, wofür es aber keinen Empfänger basierend auf dem ESP gibt. Man bräuchte einen Rasperry und Linux dafür. Wollte ich nicht. ESP Now ist eine eigens von Expressif entwickeltes Kommunikationsprotokoll mit sehr wenig Overhead und einer direkten Kommunikation über 2,4 GHz. Genau das richtige. Das Senden, Empfangen, verarbeiten, eine Empfangsbestätigung schicken und diese empfangen dauert 3 Millisekunden. Ein top Wert. Bei einem http Server auf dem ESP32 lag ich bei ca 130 Millisekunden. Der Nachteil ist aber, dass ein parallelbetrieb von ESP Now und normalem WiFi ist nicht möglich. Somit ist der Slider nicht mehr per Website oder Handy App steuerbar. Aber da mich das eh genervt hat passt das
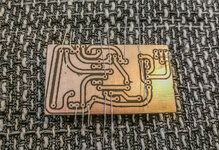
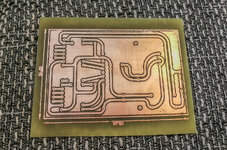
Mittlerweile sind die Programme geschrieben und erfolgreich getestet. Es war deutlich umfangreicher als das erste Projekt. Rund 2000 Zeilen Code insgesammt, wovon 1600 nur auf den Controller abfallen. Der nächste Schritt ist das Ätzen der Platinen. Das passiert jetzt am Wochenende. Die Layouts wurden in Eagle erstellt. Danach werden die zwei Gehäuse für die beiden Steuerungen gefertigt
Der Controller:
- Ein Controller basierend auf einem ESP32 mit 0.96 Zoll Oled Display, betrieben mit einem 1800 mAh Akku. Die alte Steuerung lief mit einem ESP8266. Der ist noch immer ok und wäre vermutlich auch mehr als ausreichend für die Steuerung gewesen. Aber da ich beim Slider wegen der höheren Rechenleistung einen ESP32 verwende, wollte ich keine zwei verschiedene Microcontroller verwenden. Zusätzlich gibt es ein paar tolle Vorteile: Der ESP32 ist ein Dualcor Controller. Ich habe das Programm so geschrieben, dass alle Nutzereingaben, WiFi und das Display in einem Thread und das eigentliche Programm in einem anderen Thread läuft. Dies hat unglaubliche Performancevorteile
- Die Eingabe der Parameter läuft direkt per Drehencoder (Drehrad mit Taster) - Der Akku kann direkt und ohne Ausbau per mUSB geladen werden, eine Ladeschutzschaltung ist auf der Platine integriert
- Die Kamera kann nach wie vor per IR oder per Kabel ausgelöst werden. Gegenüber der alten Steuerung ist ein zusätzlicher Schaltkreis für das Fokussignal integriert. Ohne gibt es gerade bei meinen Olympus Kameras Probleme. Ein Mechanischer Taster für die Auslösung wie bei einem Kabelfernauslöser ist im Gehäuse integriert
- Alles ist mit 8x4x2,5 cm sehr kompakt und problemlos zu transportieren
Der Slider:
- Er hat eine eigene Platine mit einem ESP32. Dieser empfängt nur Instruktionen vom Controller und führt diese aus
- Zwei Schrittmotortreiber sind auf dem Board untergebracht
- Die Slidersteuerung läuft weiterhin mit 12 Volt wegen den Schrittmotoren. Da die Steuerung für den Slider aber physisch unabhängig ist vom eigentlichen Controller kann diese fix am Slider untergebracht werden und die Größe stört dort nicht mehr
So, das war mal ein grober Überblick. Nun zu den Details: Der Controller läuft ja mit einem 1800 mAh Akku. Schaltet man ihn ein hat man zwei Menüpunkte zur Auswahl:
- "Auslösung". In "Auslösung" ist der Bulbmodus (mit einstellbarer Zeit in Sekunden und ein freier Bulbmodus) und der Intervallauslöser auswählbar
- "Einstellungen". In "Einstellungen" kann man das IR Signal nach Hersteller auswählen und ein paar Einstellungen bezüglich den Schrittmotoren. Diese werden aber nur relevant wenn man den Controller verbindet. Das funktioniert folgendermaßen: Man schaltet den Slider ein. Der Controller des Sliders stellt automatisch einen Art Accespoint zur verfügung. Aktiviert man nun in den Einstellungen des eigentlichen Controllers die Option "WiFi", so verbindet sich dieser mit dem Slider. Ab dem Zeitpunkt werden zusätzliche Menüpunkte freigeschaltet:
- "Timelapse": Hier kann man nun die Schrittweite in mm Eingeben, die Rotation in 1/10 Grad Schritten, die maximale Auslösungszeit und das Intervall. Startet man das Programm läuf alles folgendermaßen ab: Es wird ein Bild geschossen und der Controller wartet die eingestellte maximale Auslösezeit ab. Danach wird dem Slider geschickt was er tun soll und dann die restliche Zeit zur eingestellten Intervallzeit abgewartet. Danach wird das nächste Bild ausgelöst und alles geht so weiter
- "Fahrt": Hier kann man eine lineare und eine Rotationsgeschwindigkeit einstellen und diese aktivieren. Interessant für Filmaufnahmen
- "Astro": Der Modus bleibt, auch wenn er bei der ersten Version Nicht ganz perfekt läuft. Man kann damit die Rotationsachse in der Geschwindigkeit laufen lassen um die Erdrotation auszugleichen. Das Problem ist, dass die Ausrichtung lange nicht so gut klappt wie mit dem dafür ausgelegten Skywatcher. Zusätzlich trifft man je nach Untersetzung und Schrittweiten die Geschwindigkeit der Erde nicht ganz exakt. Aber rund 5 Minuten Belichtungszeit bei 15 mm Brennweit @ FF ist machbar. Als kleines Gimmick voll in Ordnung
Weiter in den Details. Ich habe geschrieben "eine Art WiFi Accespoint". Die Kommunikation zwischen den beiden ESPs läuft per ESP Now. Ich hatte erst überlegungen es wieder mit einem http Server zu lösen. Allerdings hat http viel Overhead: 26 byte Ethernet 20 byte TCP, 20 byte IP und durch den dreifach Handshake (PSH,Ack,Ack) vergeht auch relativ viel Zeit. Eine Alternative wäre MQTT, wofür es aber keinen Empfänger basierend auf dem ESP gibt. Man bräuchte einen Rasperry und Linux dafür. Wollte ich nicht. ESP Now ist eine eigens von Expressif entwickeltes Kommunikationsprotokoll mit sehr wenig Overhead und einer direkten Kommunikation über 2,4 GHz. Genau das richtige. Das Senden, Empfangen, verarbeiten, eine Empfangsbestätigung schicken und diese empfangen dauert 3 Millisekunden. Ein top Wert. Bei einem http Server auf dem ESP32 lag ich bei ca 130 Millisekunden. Der Nachteil ist aber, dass ein parallelbetrieb von ESP Now und normalem WiFi ist nicht möglich. Somit ist der Slider nicht mehr per Website oder Handy App steuerbar. Aber da mich das eh genervt hat passt das
Mittlerweile sind die Programme geschrieben und erfolgreich getestet. Es war deutlich umfangreicher als das erste Projekt. Rund 2000 Zeilen Code insgesammt, wovon 1600 nur auf den Controller abfallen. Der nächste Schritt ist das Ätzen der Platinen. Das passiert jetzt am Wochenende. Die Layouts wurden in Eagle erstellt. Danach werden die zwei Gehäuse für die beiden Steuerungen gefertigt
Anhänge
-
 Exif-Datencontroller.jpg211,9 KB · Aufrufe: 99
Exif-Datencontroller.jpg211,9 KB · Aufrufe: 99 -
 Exif-Datenstepper.jpg247,9 KB · Aufrufe: 82
Exif-Datenstepper.jpg247,9 KB · Aufrufe: 82 -
 Exif-DatenIMG_20190222_104447.jpg772,5 KB · Aufrufe: 213
Exif-DatenIMG_20190222_104447.jpg772,5 KB · Aufrufe: 213



")
") . Aber danach geht es weiter
. Aber danach geht es weiter








