kabauterman
Themenersteller
Wem gefallen sie nicht, die Timelapse Aufnahmen mit Kamerabewegung oder schöne smoothe Kamerafahrten in Videos.
Wenn man sich dann aber mal anschaut was fertige, vllt. noch Programmierbare, Slider mit Motor kosten, legt mal die Idee schnell wieder unter "schön wärs" ab.
Das war so in ungefähr mein Gedankengang jedoch hab ich es als Herrausforderung angesehen das "Problem" irgendwie im Eigenbau zu lösen,
und ich meine keine halbherzige Lösungen aus dem Baumarkt sondern etwas stabiles und langlebiges.

Was kann er (Features):
- die Stecke des Sliders in einer variablen bestimmbaren Zeit gleichmäßig "abfahren" (Timelapse)
- leise und ohne ruckeln arbeiten
- Geschwindigkeits "presets" für Videos
- Automatischer Stop oder automatisches Wenden am Ende
- Kalibrierungsmöglichkeit, so das der Code nicht geändert werden muss für unterschiedliche Slider längen
- Verbindung und Programmierung per Smartphone (ohne App)
Was sonst noch schön wäre:
- günstig
- Stop-Shoot-Go-Stop-Shoot-Go Funktion für Langzeitbelichtungen
- Auslösen der Kamera
- schicke Javascript/HTML5 Seite für die Programmierung.
Was man braucht:
- Slider eurer Wahl (fertiger Manueller Slider, Professionelles "Rail" System oder Baumarkt Slider)
- kräftiger Stepper Motor (12V)
- Stepper Treiber (ich empfehle den SilentStepStick, da kein anderer annährend so leise und Ruckelfrei arbeitet)
- Zahnriemen und Zahnräder die auf die Welle des Motors passen
- ESP8266 Serial Wireless Adapter (07,12E, 201 je nach Präferenz)
- Prototyping PCBs
- einige Elektonikbauteile (Kabel, Taster, Pin-Leisten, Stecker usw.)
- einige Metallbauteile
- Lötkolben, Bohrmaschiene, Schrauben usw.
- Etwas Geschick und Geduld
--------------------------------------------------------------------------------------
Kurze Erklärung zum Herzstück, dem ESP8266.
Eigentlich ein Serieller WLAN (b/g/n) Controller der sich über "AT" Befehle ansteuern und z.B. hinter einen Arduino verwenden lässt, vergleichbar mit dem Arduino WLAN-Shield.
https://en.wikipedia.org/wiki/ESP8266
Mit einer 32-bit CPU die mit 80 MHz taktet ist das Teil JEDEM Arduino bei der Rechenleistung um längen überlegen, 96 KB RAM und bis zu 4 MB Flash, und jede Menge GPIO Pins (16) machen das Teil zu einer Internet-of-Things Geheimwaffe.
Mit dem ESP8266 Arduino Projekt https://github.com/esp8266/Arduino
kann man das Teil wie einen gewöhnlichen Arduino (+ die ESP Spezifischen WLAN Befehle) per Arduino IDE programmieren.
Da Arduinos in der Regel mehr kosten, langsamer sind, weniger Speicher bieten und dazu keine Funkmöglichkeiten mit an Board haben, bleiben eigentlich kaum noch Fragen offen.
--------------------------------------------------------------------------------------
Zur Umsetzung:
Ich erkläre das ganze hier anhand von meinem ursprünglich "dummen" Ultra Low Cost Slider.
Der Besteht aus einem IGUS Rail System, ist zwar nur 25cm Lang, aber das Projekt lässt sich auf jede gewünschte Sliderlänge anwenden.
Der Slider wurde mit einem Stepper Motor, Zahnriemen und Zahnrädern aus einem alten Nadeldrucker "upgegraded". Er läuft mir 12V aus einem Akku oder Netzteil.
Gesamtkosten für diesen smarten Minislider liegen bei ca. 15 € (SilentStepStick, ESP8266 und Platinen).
Was der kann und wie er aufgebaut ist werde ich in kürze anhand eines kleinen Videos zeigen.
--------------------------------------------------------------------------------------
Schaltplan:

http://abload.de/img/anleitung8ap1j.jpg
--------------------------------------------------------------------------------------
Quellcode:
Den Quellcode gibt es hier:
https://github.com/kabauterman/SmartSlider
IP:192.168.4.1
WLAN: TotalControl Passphrase: TotalControl
en = GPIO16
cfg1 = GPIO14
stp = GPIO12
dir = GPIO13
chdir0 = GPIO4
chdir1 = GPIO5
--------------------------------------------------------------------------------------
Vorgehen:
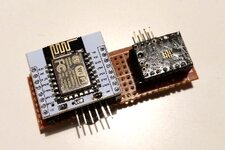
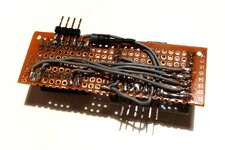
Zuerst einmal muss man alle Verbindungen soweit herstellen wie auf meinem "Schaltplan" zu sehen. Das geht entweder auf einem Breadboard, zum testen, oder mit einem Prototyping PCB, das bietet sich an da man so im Notfall einzelne Bauteile ohne viel Aufwand tauschen kann. Direkt Kabel am ESP und Stepper Driver verlöten funktioniert natürlich auch ist aber umständlich und man hat am Ende keine Platine die man irgendwo verstauen kann.
Der ESP 201 ist direkt mit normalen PCB's verwendbar und hat schon die richtigen Lochabstände, für ESP 07 oder 12 gibt es so genannte Adapter Boards (sehen so aus).
Die kann ich jedem nur empfehlen da sie schon die nötigen Verbindungen herstellen wenn man die Wiederstände unten überbrückt oder auslötet.
Man kann auf der Unterseite sogar direkt einen Spannungswandler für 3,3V (der ESP braucht explizit 3,3V, 5V killen das teil, 12V erst recht) platzieren und durch die Wiederstände und Lötbrücken (bitte gewissenhaft durchmessen) 12V am Board anschließen und der ESP bekommt dann die 3,3V vom Spannungswandler. Das spart unnötige Kabel und macht die ganze Bastellösung ein ganzes Stück schicker.
Flashen muss man den ESP im Normalfall nur wenn es eine neuere Version meines Smart Stepper Programms gibt. Die TX, RX, GND und GPIO0 (für den Flash Modus) Pins muss man also nicht unbedingt auf dem PCB nach außen führen, es reicht dann den ESP samt Adapter Board vom PCB zu nehmen und an einen USB zu Seriel Converter anzuschließen, anschließend GPIO0 und GND kurzschließen und die Stromversorgung des ESP's anschalten.
Über die Arduino IDE kann man dann den ESP wie einen Arduino Programmieren, wie genau man die arduino esp Software in der IDE hinzufügt wird auf der verlinkten github Seite des Projekts erklärt.
Ist die Software einmal auf dem ESP, kann es eigentlich nurnoch bei der Verkabelung zu Problemen kommen.
Die Belegung und Bezeichnung der Kabel bei den Stepper Motoren ist nicht ganz eindeutig gelöst, es muss sich auf jeden Fall um einen Stepper mit 4 poligem Kabel handeln. Diese 4 Kabel müssen an die Motor Ausgänge des StepStick Drivers. Sind alle Verbindungen OK, der ESP Läuft, der StepStick hat Strom (12V an VM, Voltage Motor). und der Motor dreht sich am Ende nicht, muss man vermutlich mit den Kabeln des Motors am StepStick herrum probieren.
tbc.
--------------------------------------------------------------------------------------
Nachbauen ist ausdrücklich erwünscht! Ich freue mich über jeden dem ich helfen kann mit relativ wenig Geld einen smarten, motorisieren Slider zu bauen.
Wer Programmierkenntnisse mit Arduino hat kann sich natürlich gerne an zukünftigen Versionen des Quellcodes beteiligen und vllt. helfen noch fehlende Funktionen zu integrieren oder das Interface zu verbessern.
Wenn man sich dann aber mal anschaut was fertige, vllt. noch Programmierbare, Slider mit Motor kosten, legt mal die Idee schnell wieder unter "schön wärs" ab.
Das war so in ungefähr mein Gedankengang jedoch hab ich es als Herrausforderung angesehen das "Problem" irgendwie im Eigenbau zu lösen,
und ich meine keine halbherzige Lösungen aus dem Baumarkt sondern etwas stabiles und langlebiges.
Was kann er (Features):
- die Stecke des Sliders in einer variablen bestimmbaren Zeit gleichmäßig "abfahren" (Timelapse)
- leise und ohne ruckeln arbeiten
- Geschwindigkeits "presets" für Videos
- Automatischer Stop oder automatisches Wenden am Ende
- Kalibrierungsmöglichkeit, so das der Code nicht geändert werden muss für unterschiedliche Slider längen
- Verbindung und Programmierung per Smartphone (ohne App)
Was sonst noch schön wäre:
- günstig
- Stop-Shoot-Go-Stop-Shoot-Go Funktion für Langzeitbelichtungen
- Auslösen der Kamera
- schicke Javascript/HTML5 Seite für die Programmierung.
Was man braucht:
- Slider eurer Wahl (fertiger Manueller Slider, Professionelles "Rail" System oder Baumarkt Slider)
- kräftiger Stepper Motor (12V)
- Stepper Treiber (ich empfehle den SilentStepStick, da kein anderer annährend so leise und Ruckelfrei arbeitet)
- Zahnriemen und Zahnräder die auf die Welle des Motors passen
- ESP8266 Serial Wireless Adapter (07,12E, 201 je nach Präferenz)
- Prototyping PCBs
- einige Elektonikbauteile (Kabel, Taster, Pin-Leisten, Stecker usw.)
- einige Metallbauteile
- Lötkolben, Bohrmaschiene, Schrauben usw.
- Etwas Geschick und Geduld
--------------------------------------------------------------------------------------
Kurze Erklärung zum Herzstück, dem ESP8266.
Eigentlich ein Serieller WLAN (b/g/n) Controller der sich über "AT" Befehle ansteuern und z.B. hinter einen Arduino verwenden lässt, vergleichbar mit dem Arduino WLAN-Shield.
https://en.wikipedia.org/wiki/ESP8266
Mit einer 32-bit CPU die mit 80 MHz taktet ist das Teil JEDEM Arduino bei der Rechenleistung um längen überlegen, 96 KB RAM und bis zu 4 MB Flash, und jede Menge GPIO Pins (16) machen das Teil zu einer Internet-of-Things Geheimwaffe.
Mit dem ESP8266 Arduino Projekt https://github.com/esp8266/Arduino
kann man das Teil wie einen gewöhnlichen Arduino (+ die ESP Spezifischen WLAN Befehle) per Arduino IDE programmieren.
Da Arduinos in der Regel mehr kosten, langsamer sind, weniger Speicher bieten und dazu keine Funkmöglichkeiten mit an Board haben, bleiben eigentlich kaum noch Fragen offen.
--------------------------------------------------------------------------------------
Zur Umsetzung:
Ich erkläre das ganze hier anhand von meinem ursprünglich "dummen" Ultra Low Cost Slider.
Der Besteht aus einem IGUS Rail System, ist zwar nur 25cm Lang, aber das Projekt lässt sich auf jede gewünschte Sliderlänge anwenden.
Der Slider wurde mit einem Stepper Motor, Zahnriemen und Zahnrädern aus einem alten Nadeldrucker "upgegraded". Er läuft mir 12V aus einem Akku oder Netzteil.
Gesamtkosten für diesen smarten Minislider liegen bei ca. 15 € (SilentStepStick, ESP8266 und Platinen).
Was der kann und wie er aufgebaut ist werde ich in kürze anhand eines kleinen Videos zeigen.
--------------------------------------------------------------------------------------
Schaltplan:
http://abload.de/img/anleitung8ap1j.jpg
--------------------------------------------------------------------------------------
Quellcode:
Den Quellcode gibt es hier:
https://github.com/kabauterman/SmartSlider
IP:192.168.4.1
WLAN: TotalControl Passphrase: TotalControl
en = GPIO16
cfg1 = GPIO14
stp = GPIO12
dir = GPIO13
chdir0 = GPIO4
chdir1 = GPIO5
--------------------------------------------------------------------------------------
Vorgehen:
Zuerst einmal muss man alle Verbindungen soweit herstellen wie auf meinem "Schaltplan" zu sehen. Das geht entweder auf einem Breadboard, zum testen, oder mit einem Prototyping PCB, das bietet sich an da man so im Notfall einzelne Bauteile ohne viel Aufwand tauschen kann. Direkt Kabel am ESP und Stepper Driver verlöten funktioniert natürlich auch ist aber umständlich und man hat am Ende keine Platine die man irgendwo verstauen kann.
Der ESP 201 ist direkt mit normalen PCB's verwendbar und hat schon die richtigen Lochabstände, für ESP 07 oder 12 gibt es so genannte Adapter Boards (sehen so aus).
Die kann ich jedem nur empfehlen da sie schon die nötigen Verbindungen herstellen wenn man die Wiederstände unten überbrückt oder auslötet.
Man kann auf der Unterseite sogar direkt einen Spannungswandler für 3,3V (der ESP braucht explizit 3,3V, 5V killen das teil, 12V erst recht) platzieren und durch die Wiederstände und Lötbrücken (bitte gewissenhaft durchmessen) 12V am Board anschließen und der ESP bekommt dann die 3,3V vom Spannungswandler. Das spart unnötige Kabel und macht die ganze Bastellösung ein ganzes Stück schicker.
Flashen muss man den ESP im Normalfall nur wenn es eine neuere Version meines Smart Stepper Programms gibt. Die TX, RX, GND und GPIO0 (für den Flash Modus) Pins muss man also nicht unbedingt auf dem PCB nach außen führen, es reicht dann den ESP samt Adapter Board vom PCB zu nehmen und an einen USB zu Seriel Converter anzuschließen, anschließend GPIO0 und GND kurzschließen und die Stromversorgung des ESP's anschalten.
Über die Arduino IDE kann man dann den ESP wie einen Arduino Programmieren, wie genau man die arduino esp Software in der IDE hinzufügt wird auf der verlinkten github Seite des Projekts erklärt.
Ist die Software einmal auf dem ESP, kann es eigentlich nurnoch bei der Verkabelung zu Problemen kommen.
Die Belegung und Bezeichnung der Kabel bei den Stepper Motoren ist nicht ganz eindeutig gelöst, es muss sich auf jeden Fall um einen Stepper mit 4 poligem Kabel handeln. Diese 4 Kabel müssen an die Motor Ausgänge des StepStick Drivers. Sind alle Verbindungen OK, der ESP Läuft, der StepStick hat Strom (12V an VM, Voltage Motor). und der Motor dreht sich am Ende nicht, muss man vermutlich mit den Kabeln des Motors am StepStick herrum probieren.
tbc.
--------------------------------------------------------------------------------------
Nachbauen ist ausdrücklich erwünscht! Ich freue mich über jeden dem ich helfen kann mit relativ wenig Geld einen smarten, motorisieren Slider zu bauen.
Wer Programmierkenntnisse mit Arduino hat kann sich natürlich gerne an zukünftigen Versionen des Quellcodes beteiligen und vllt. helfen noch fehlende Funktionen zu integrieren oder das Interface zu verbessern.
Anhänge
-
 Exif-DatenDSC00949.jpg126,2 KB · Aufrufe: 179
Exif-DatenDSC00949.jpg126,2 KB · Aufrufe: 179 -
 Exif-DatenDSC00950.jpg88,8 KB · Aufrufe: 117
Exif-DatenDSC00950.jpg88,8 KB · Aufrufe: 117
Zuletzt bearbeitet:
") .
.