ich finde bei dieser aufklappbaren variante ist immer das schanier das problem, das hast du bei der anderen nicht da kannste am drehpunkt schön mit kugellager arbeiten, ich hab das ganze in eine art tisch konstrucktion verpackt
App installieren
How to install the app on iOS
Follow along with the video below to see how to install our site as a web app on your home screen.
Anmerkung: this_feature_currently_requires_accessing_site_using_safari
-
In eigener Sache!
Liebe Mitglieder, liebe Besucher und Gäste
ich weiß, es ist ein leidiges Thema, aber ich muss es ansprechen: Werbung, Werbeblocker und Finanzierung des Forums.
Bitte hier weiterlesen ... -
DSLR-Forum Fotowettbewerb neu erfunden!
Nach wochenlanger intensiver Arbeit an der Erneuerung des Formates unseres internen Fotowettbewerbes ist es Frosty als Moderator
und au lait als Programmierer gelungen, unseren Wettbewerb auf ein völlig neues Level zu heben!
Lest hier alle Infos zum DSLR-Forum Fotowettbewerb 2.0
Einen voll funktionsfähigen Demowettbewerb kannst du dir hier ansehen. -
Neuer Partner: AkkuShop.de
Akkus, Ladegeräte und mehr (nicht nur) für Digitalkameras und Drohnen
-
Neuer Gutscheincode unseres Partners Schutzfolien24:
DSLR-Forum2024
Dauerhaft 10% Rabatt auf alle Displayschutzfolien der Eigenmarken "Upscreen", "Brotec", "Savvies".
Der Code ist für alle Geräteklassen gültig. -
Stimmt ab über die Sieger des DSLR-Forum Fotowettbewerbs April 2024.
Thema: "Sprichwörtlich"
Nur noch bis zum 30.04.2024 23:59!
Jeder darf abstimmen!
Zur Abstimmung und Bewertung hier lang
WERBUNG
Du verwendest einen veralteten Browser. Es ist möglich, dass diese oder andere Websites nicht korrekt angezeigt werden.
Du solltest ein Upgrade durchführen oder einen alternativen Browser verwenden.
Du solltest ein Upgrade durchführen oder einen alternativen Browser verwenden.
DIY-High-Quality-Barndoor / Astronachführung
Meine Barndoor läuft mittlerweile zuverlässig und konnte nun an der Andromeda Galaxie getestet werden.
Belichtet wurde 15 x 90 Sekunden an einem Viviatar 200mm.

Belichtet wurde 15 x 90 Sekunden an einem Viviatar 200mm.
Nachdem ich letztendlich dann doch von dem "Klappbaren Barndoor" abgewinkt hab. Werd ich nun doch diese Variante bevorzugen falls bedarf an der PDF mit Maßen besteht kann ja mir kurz ne PN schreiben dann werd ichs veröffentlichen bei Interesse
Anhänge
-
 Exif-Datensdfgdsfg.png48,4 KB · Aufrufe: 259
Exif-Datensdfgdsfg.png48,4 KB · Aufrufe: 259
Moin!
Da ich schon lange mal wieder ein Bastelprojekt fernab meiner sonstigen suchte und Lust hatte in die Arduino Welt zu gucken, habe ein Kumpel und ich uns nach langem Tratschen und Recherchieren auch dazu entschlossen eine Nachführung zu bauen.
Es sollte ebenfalls der "astrotrac-Aufbau" verwendet werden, jedoch nicht mit einer Gewindestange, sondern mit einer Zahnstange.
Als Antrieb sollte ein einfacher Schrittmotor herhalten, die Kosten möglichst gering.
Da ich keine Lust hatte die "Kameraschwenkmethode zur Einrichtung der Drehachse" zu verwenden, kam noch ein gebrauchter Polsucher mit 30€ als Kostentreiber hinzu.
Die mit Abstand größte Investition war ein abgebrocher VHM Fräser
Ich habe mich für durchgängig Aluminium entschieden, kostengünstiger und einfach wird es, wenn man POM als Achse verwendet.
Hier die Liste der verwendeten Teile:
Die Frage ist, warum Alu, warum ein Schrittmotor, warum Zahnstange, warum überhaupt dieses Konzept?
Ich liebe es mit Alu zu arbeiten, mag die Farbe von Messing nicht und hatte keine Lust auf Holz.
Es gibt tausend Möglichkeiten "unser" Konzept mit weniger Aufwand und Kosten zu bauen, zB aus Multiplex und man wird im Ergebnis auf exakt die gleiche Nachführungsqualität kommen, da bin ich mir sicher.
Ein Schrittmotor ist um einiges günstiger und viel einfacher in der Geschwindigkeit zu kalibrieren.
Mein Kumpel baut schon länger 3D Drucker und ist mit M6 Gewindestangen als Antrieb nicht zufrieden, es gibt häufig Abweichungen.
Das Grundkonzept "astrotrac" scheint mir einfach am stabilsten zu sein bei geringstem Gewicht.
Kosten der Antriebseinheit, Motor + Arduino
Motor 1,63
Arduino 2,60
Taster 0,10
Powerschalter 0,30
Batterieclip 4,80€ (teuer bei Amazon gekauft...)
Zahnrad 4,-
Zahnstange 4,20 (reicht für 2 Nachführungen)
mit LEDs Widerständen und Kabel kommt man also deutlich unterhalb von 20 Euro aus.
Ein erster Prototyp ist fertig, gestern erfolgte der erste Kalibrierungstest und nun weiß ich was ich alles falsch gemacht haben
Das meiste kann ich mit wenigen Änderungen gerade biegen, einiges muss ich so hinnehmen. Auf jeden Fall werde ich mir sowas wie einen "astrotrac wedge" bauen!
Ich bin brandneu in der Arduino Welt und der Code ist noch recht schmutzig aber er läuft.
Ich werde später eine exakte Teileliste mit Quellen, von mir gezahlten Preisen und Alternativen einstellen.
Der Code wird hochgeladen, wenn ich mich nicht mehr all zu lächerlich mache.
Evtl. kann ich dem ein oder anderen, der etwas ähnliches bauen möchte auch anbieten mal eine Bohrung zu spindeln oder die Achse zu drehen.
Funktion der Steuerung:
einmal kurz drücken und die Nachführung führt nach
noch einmal kurz drücken und die Nachführung stoppt
3 Sekunden drücken und die Nachführung fährt im Eilgang in die Nullposition.
Der Motor:
Untersetzt mit ca. 1:64
ergibt 4075,77 Schritte/Umdrehung
Bei meiner Untersetzung der Zahnstange komme ich auf 3,52 Schritte/Sekunde
Erste Ergebnisse:
4min 14mm an KB, glasklare Punkte
1 min 300mm an KB, nach vielen iterativen Schritten zur Geschwindigkeitsanpassung passabel, aber noch "Doppeleier".
Ein Test mit 3min Richtung Polaris zeigte das gleiche Bild, kein Drehzentrum ist auszumachen, ich denke ich habe schlecht ausgerichtet und die Gesamtkonstruktion war zu instabil (nicht die Nachführung, sondern das voll ausgezogene Reisestativ und der Jobi Gorillapod Kugelkopf...
Es folgen erneute Kalibrierungstests sobald ich mir ein stabiles Stativ mit 3 Wege Neiger geliehen habe.
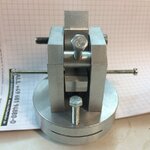
Anbei ein ersters Bild des Prototypen der Nachführung.
Da ich schon lange mal wieder ein Bastelprojekt fernab meiner sonstigen suchte und Lust hatte in die Arduino Welt zu gucken, habe ein Kumpel und ich uns nach langem Tratschen und Recherchieren auch dazu entschlossen eine Nachführung zu bauen.
Es sollte ebenfalls der "astrotrac-Aufbau" verwendet werden, jedoch nicht mit einer Gewindestange, sondern mit einer Zahnstange.
Als Antrieb sollte ein einfacher Schrittmotor herhalten, die Kosten möglichst gering.
Da ich keine Lust hatte die "Kameraschwenkmethode zur Einrichtung der Drehachse" zu verwenden, kam noch ein gebrauchter Polsucher mit 30€ als Kostentreiber hinzu.
Die mit Abstand größte Investition war ein abgebrocher VHM Fräser
Ich habe mich für durchgängig Aluminium entschieden, kostengünstiger und einfach wird es, wenn man POM als Achse verwendet.
Hier die Liste der verwendeten Teile:
- Arduino Nano V3
- 4 x AA in einem clip
- Batterieanschlußkabel 2polig
- Taster
- Power on/off Schalter
- Stepper 28byj-48
- Zahnrad Z15 M0,5
- Zahnstange 240mm M0.5
- Alu rund D50, besser POM, Achse, Achsdeckel, Polsucheraufnahme
- Alu flach t5mm x b100mm, Antriebsblech
- Alu flach t5mm x b50mm, Basisblech und Polsucher
- Schraube für Kugelkopf 3/8 auf M6
- Polsucher
- Teflonfolie (Dauerbackfolie Aldi)
- Senkkopfchraube M8 für Deckel Achse
- Schrauben M3 für Motor, Zahnstange und Polsucher
- Schraube M4 Senkkopf für Verbindung Achse Antriebsblech
Die Frage ist, warum Alu, warum ein Schrittmotor, warum Zahnstange, warum überhaupt dieses Konzept?
Ich liebe es mit Alu zu arbeiten, mag die Farbe von Messing nicht und hatte keine Lust auf Holz.
Es gibt tausend Möglichkeiten "unser" Konzept mit weniger Aufwand und Kosten zu bauen, zB aus Multiplex und man wird im Ergebnis auf exakt die gleiche Nachführungsqualität kommen, da bin ich mir sicher.
Ein Schrittmotor ist um einiges günstiger und viel einfacher in der Geschwindigkeit zu kalibrieren.
Mein Kumpel baut schon länger 3D Drucker und ist mit M6 Gewindestangen als Antrieb nicht zufrieden, es gibt häufig Abweichungen.
Das Grundkonzept "astrotrac" scheint mir einfach am stabilsten zu sein bei geringstem Gewicht.
Kosten der Antriebseinheit, Motor + Arduino
Motor 1,63
Arduino 2,60
Taster 0,10
Powerschalter 0,30
Batterieclip 4,80€ (teuer bei Amazon gekauft...)
Zahnrad 4,-
Zahnstange 4,20 (reicht für 2 Nachführungen)
mit LEDs Widerständen und Kabel kommt man also deutlich unterhalb von 20 Euro aus.
Ein erster Prototyp ist fertig, gestern erfolgte der erste Kalibrierungstest und nun weiß ich was ich alles falsch gemacht haben
Das meiste kann ich mit wenigen Änderungen gerade biegen, einiges muss ich so hinnehmen. Auf jeden Fall werde ich mir sowas wie einen "astrotrac wedge" bauen!
Ich bin brandneu in der Arduino Welt und der Code ist noch recht schmutzig aber er läuft.
Ich werde später eine exakte Teileliste mit Quellen, von mir gezahlten Preisen und Alternativen einstellen.
Der Code wird hochgeladen, wenn ich mich nicht mehr all zu lächerlich mache.
Evtl. kann ich dem ein oder anderen, der etwas ähnliches bauen möchte auch anbieten mal eine Bohrung zu spindeln oder die Achse zu drehen.
Funktion der Steuerung:
einmal kurz drücken und die Nachführung führt nach
noch einmal kurz drücken und die Nachführung stoppt
3 Sekunden drücken und die Nachführung fährt im Eilgang in die Nullposition.
Der Motor:
Untersetzt mit ca. 1:64
ergibt 4075,77 Schritte/Umdrehung
Bei meiner Untersetzung der Zahnstange komme ich auf 3,52 Schritte/Sekunde
Erste Ergebnisse:
4min 14mm an KB, glasklare Punkte
1 min 300mm an KB, nach vielen iterativen Schritten zur Geschwindigkeitsanpassung passabel, aber noch "Doppeleier".
Ein Test mit 3min Richtung Polaris zeigte das gleiche Bild, kein Drehzentrum ist auszumachen, ich denke ich habe schlecht ausgerichtet und die Gesamtkonstruktion war zu instabil (nicht die Nachführung, sondern das voll ausgezogene Reisestativ und der Jobi Gorillapod Kugelkopf...
Es folgen erneute Kalibrierungstests sobald ich mir ein stabiles Stativ mit 3 Wege Neiger geliehen habe.
Anbei ein ersters Bild des Prototypen der Nachführung.
Anhänge
-
 Exif-DatenIMG_1492.JPG57,2 KB · Aufrufe: 204
Exif-DatenIMG_1492.JPG57,2 KB · Aufrufe: 204 -
 Exif-DatenIMG_1489.JPG36,8 KB · Aufrufe: 194
Exif-DatenIMG_1489.JPG36,8 KB · Aufrufe: 194 -
 Exif-DatenIMG_1483.JPG25,4 KB · Aufrufe: 134
Exif-DatenIMG_1483.JPG25,4 KB · Aufrufe: 134 -
 Exif-DatenIMG_1482.JPG33,1 KB · Aufrufe: 176
Exif-DatenIMG_1482.JPG33,1 KB · Aufrufe: 176 -
 Exif-DatenIMG_1480.JPG34,7 KB · Aufrufe: 211
Exif-DatenIMG_1480.JPG34,7 KB · Aufrufe: 211
hier noch 3 100% crops der Testaufnahmen
14mm Richtung Jupiter 241 Sekunden
300m Richtung Polaris 180 Sekunden
300mm Richtung rechts von Jupiter 57 Sekunden
alle so entwickelt, daß man die Striche erkennt, nicht auf den Bildinhalt
Der Vergleich der letzten beiden Bilder sagt MIR, daß die Nachführung schlecht ausgerichtet oder verrutscht ist, oder die Kamera absackt (würde dann eher senkrechte Striche erwarten?), was meint ihr?
14mm Richtung Jupiter 241 Sekunden
300m Richtung Polaris 180 Sekunden
300mm Richtung rechts von Jupiter 57 Sekunden
alle so entwickelt, daß man die Striche erkennt, nicht auf den Bildinhalt
Der Vergleich der letzten beiden Bilder sagt MIR, daß die Nachführung schlecht ausgerichtet oder verrutscht ist, oder die Kamera absackt (würde dann eher senkrechte Striche erwarten?), was meint ihr?
Anhänge
-
 Exif-Daten14mm-241sek-jupiter.jpg176,2 KB · Aufrufe: 107
Exif-Daten14mm-241sek-jupiter.jpg176,2 KB · Aufrufe: 107 -
 Exif-Daten300m-180sek-polaris.jpg325,4 KB · Aufrufe: 130
Exif-Daten300m-180sek-polaris.jpg325,4 KB · Aufrufe: 130 -
 Exif-Daten300mm-57sek-rechts-von-jupiter.jpg70,8 KB · Aufrufe: 108
Exif-Daten300mm-57sek-rechts-von-jupiter.jpg70,8 KB · Aufrufe: 108
Woran erkennt ihr eigentlich ob die Nachführung zu schnell oder zu langsam dreht? Einfach so lange rumprobieren bis es schlechter wird und dann in die Gegenrichtung?
Die Polwiege ist fast fertig, noch die Gewinde einkürzen, Handräder drehen und das ganze mit der Nachführung verheiraten.
Dann darf es endlich wieder klarer Himmel werden..
Die Polwiege ist fast fertig, noch die Gewinde einkürzen, Handräder drehen und das ganze mit der Nachführung verheiraten.
Dann darf es endlich wieder klarer Himmel werden..
Anhänge
-
 Exif-DatenIMG_1509.JPG108,1 KB · Aufrufe: 108
Exif-DatenIMG_1509.JPG108,1 KB · Aufrufe: 108 -
 Exif-DatenIMG_1508.JPG113,4 KB · Aufrufe: 119
Exif-DatenIMG_1508.JPG113,4 KB · Aufrufe: 119
und nochmals Fotos der kompletten Einheit, vlt bekomme ich ja doch nochmal eine Antwort auf meine Fragen
Wenn jemand Fragen hat oder Maße benötigt, nur zu.
Wenn jemand Fragen hat oder Maße benötigt, nur zu.
Anhänge
-
 Exif-DatenFoto 06.04.16, 20 18 02.jpg175,7 KB · Aufrufe: 144
Exif-DatenFoto 06.04.16, 20 18 02.jpg175,7 KB · Aufrufe: 144 -
 Exif-DatenFoto 06.04.16, 20 18 11.jpg180,5 KB · Aufrufe: 113
Exif-DatenFoto 06.04.16, 20 18 11.jpg180,5 KB · Aufrufe: 113
Hi
Also ich würde die Kamera bei eingenordeter Nachführung auf einen Stern nahe des Himmeläquators ausrichten, da dort die Abweichungen in der Geschwindigkeit am deutlichsten sichtbar sind.
Damit du siehst, in welche Richtung du die Drehzahl anpassen musst, kannst du als erstes eine Aufnahme mit kurzer Belichtungszeit machen und danach die richtige Testaufnahme mit langer Belichtungszeit. Wenn du dann die beiden aufnahmen vergleichst, siehst du, in welche Richtung der Stern wandert.
Über die Deklination des Sterns, die Belichtungszeit und die Länge der Spur, kannst du prinzipiell auch die Größe des Drehzahlfehlers berechnen, damit sparst du dir das Ausprobieren
Je nach Qualität von Zahnstange und Zahnrad könntest du auch einen periodischen Geschwindigkeitsfehler bekommen (bei Schneckenantrieben -> periodischer Schneckenfehler).
Um den sichtbar zu machen, musst du mWn. die Nachführung bewusst falsch ausrichten (in unseren Breiten beispielsweise einfach mit Drehachse senkrecht nach oben). Wenn du dann einen Stern in der Nähe des Himmelsäquators aufnimmst, müsste ein perfekter Antrieb eine gerade Sternspur erzeugen.
Ein periodischer Fehler sorgt für "Schlangenlinien ".
(Letzteres habe ich nicht selbst ausprobiert, habe ich aber mal irgendwo gelesen und klingt für mich schlüssig.)
Hut ab vor deiner Konstruktion!
Sieht nach richtigem Maschinenbau aus
Klarer Himmel ist bei mir auch immer Mangelware... besonders dann, wenn ich Zeit und Lust hätte
Grüße
Hannes
Woran erkennt ihr eigentlich ob die Nachführung zu schnell oder zu langsam dreht? Einfach so lange rumprobieren bis es schlechter wird und dann in die Gegenrichtung?
Also ich würde die Kamera bei eingenordeter Nachführung auf einen Stern nahe des Himmeläquators ausrichten, da dort die Abweichungen in der Geschwindigkeit am deutlichsten sichtbar sind.
Damit du siehst, in welche Richtung du die Drehzahl anpassen musst, kannst du als erstes eine Aufnahme mit kurzer Belichtungszeit machen und danach die richtige Testaufnahme mit langer Belichtungszeit. Wenn du dann die beiden aufnahmen vergleichst, siehst du, in welche Richtung der Stern wandert.
Über die Deklination des Sterns, die Belichtungszeit und die Länge der Spur, kannst du prinzipiell auch die Größe des Drehzahlfehlers berechnen, damit sparst du dir das Ausprobieren
Je nach Qualität von Zahnstange und Zahnrad könntest du auch einen periodischen Geschwindigkeitsfehler bekommen (bei Schneckenantrieben -> periodischer Schneckenfehler).
Um den sichtbar zu machen, musst du mWn. die Nachführung bewusst falsch ausrichten (in unseren Breiten beispielsweise einfach mit Drehachse senkrecht nach oben). Wenn du dann einen Stern in der Nähe des Himmelsäquators aufnimmst, müsste ein perfekter Antrieb eine gerade Sternspur erzeugen.
Ein periodischer Fehler sorgt für "Schlangenlinien ".
(Letzteres habe ich nicht selbst ausprobiert, habe ich aber mal irgendwo gelesen und klingt für mich schlüssig.)
Hut ab vor deiner Konstruktion!
Sieht nach richtigem Maschinenbau aus
Klarer Himmel ist bei mir auch immer Mangelware... besonders dann, wenn ich Zeit und Lust hätte
Grüße
Hannes
hier noch 3 100% crops der Testaufnahmen
14mm Richtung Jupiter 241 Sekunden
300m Richtung Polaris 180 Sekunden
300mm Richtung rechts von Jupiter 57 Sekunden
alle so entwickelt, daß man die Striche erkennt, nicht auf den Bildinhalt
Der Vergleich der letzten beiden Bilder sagt MIR, daß die Nachführung schlecht ausgerichtet oder verrutscht ist, oder die Kamera absackt (würde dann eher senkrechte Striche erwarten?), was meint ihr?
Die Striche im zweiten Bild zeigen alle in die gleiche Richtung... Ein Fehler der Nachführung an sich, würde glaube ich nicht so aussehen.
Ich tippe auch auf Wackeln am Stativ, Wind, Absacken, o.Ä.
Das Stativ ist bei deiner Konstruktion auf jeden Fall die Schwachstelle, da würde ich an deiner Stelle als erstes ansetzen.
Ansonsten macht es vmtl. auch wenig Sinn, Tests zu Fehlern in der Nachführung zu starten.
Danke für die Hinweise, heute solls recht sternenklar werden, also war ich Schnorren.
Gut einen fotobegeisterten Bauing in der Familie zu haben, ein kinnhohes Vermessungsstativ konnte ich mir ausleihen, daran wirds heute abend also nicht scheitern
Und dazu noch ein manuelles Tokina 400/5.6, um auch das letzte bischen rauszutesten.
Hoffentlich bleibt es bei der Vorhersage
Gut einen fotobegeisterten Bauing in der Familie zu haben, ein kinnhohes Vermessungsstativ konnte ich mir ausleihen, daran wirds heute abend also nicht scheitern
Und dazu noch ein manuelles Tokina 400/5.6, um auch das letzte bischen rauszutesten.
Hoffentlich bleibt es bei der Vorhersage
Anhänge
-
 Exif-DatenFoto 08.04.16, 19 27 34.jpg199,1 KB · Aufrufe: 167
Exif-DatenFoto 08.04.16, 19 27 34.jpg199,1 KB · Aufrufe: 167
Nachdem beim letzten Versuch einiges drunter und drüber ging, haben wir es gestern erneut versucht.
Es gab leider nur ein ganz schmales Zeitfenster um Sterne zu sehen, die letzten Aufnahmen, insbesondere die vom Mond, enstanden alle bei dicht bewölktem Himmel.
Fazit des ersten Prototypen:
- die Mechanik kann deutlich günstiger hergestellt werden, aber ich wollte es ja so
- die Elektronik fällt mit unter 15€ inkl. OLED Display (mit 5,50 das teuerste Bauteil) kaum ins Gewicht
- der Polsucher kann ein Kostentreiber sein, für (U)WW Aufnahme tut es genau so gut ein Röhrchen
- eine gemeinsame Klemmung von Nachführungsarmen und dem Polsucherarm sind kontraproduktiv, da der Polsucherarm bestenfalls sehr stramm und spielfrei ist, die Nachführungsarme gern Spiel für leichten Lauf haben dürfen (nicht auf der Achse, aber zueinander)
- 100 Sekunden mit 400mm an KB sind möglich, aber man muss mit Ausschuß rechnen
Man erkennt an der ca. 90° zur Erdachse ausgerichteten Aufnahme eine Abweichung zur Sollbahn. Die Übertragung Zahnrad zu Zahnstange kann es nicht sein, da in 2 Minuten keine volle Umdrehung erfolgt, es handelt sich also um Fehler im Getriebe, nehme ich mal an.
Die Geschwindigkeit des Steppers anzupassen hat enorme Auswirkungen, bereits kleinste Änderung entscheiden zwischen fatalem Versagen und Erfolg.
(bei 2 Minuten Belichtung waren das 422 zu 416 Schritten, es lohnt sich hier eine größere Messreihe zu starten)
Der Einsatz von qdslrdashboard vereinfacht die Sache ungemein, da man direkt nach eine Belichtungsreihe die 100% Ansicht prüfen kann.
Eine Einkaufsliste, den Arduino code und weitere Bilder stelle ich im Lauf des Tages ein.
Alle Bilder mit 400mm/5,6 an D750
Sterne 103 sec f5,6
Mond 63 sec f?
Striche 123 sec f5,6
Es gab leider nur ein ganz schmales Zeitfenster um Sterne zu sehen, die letzten Aufnahmen, insbesondere die vom Mond, enstanden alle bei dicht bewölktem Himmel.
Fazit des ersten Prototypen:
- die Mechanik kann deutlich günstiger hergestellt werden, aber ich wollte es ja so
- die Elektronik fällt mit unter 15€ inkl. OLED Display (mit 5,50 das teuerste Bauteil) kaum ins Gewicht
- der Polsucher kann ein Kostentreiber sein, für (U)WW Aufnahme tut es genau so gut ein Röhrchen
- eine gemeinsame Klemmung von Nachführungsarmen und dem Polsucherarm sind kontraproduktiv, da der Polsucherarm bestenfalls sehr stramm und spielfrei ist, die Nachführungsarme gern Spiel für leichten Lauf haben dürfen (nicht auf der Achse, aber zueinander)
- 100 Sekunden mit 400mm an KB sind möglich, aber man muss mit Ausschuß rechnen
Man erkennt an der ca. 90° zur Erdachse ausgerichteten Aufnahme eine Abweichung zur Sollbahn. Die Übertragung Zahnrad zu Zahnstange kann es nicht sein, da in 2 Minuten keine volle Umdrehung erfolgt, es handelt sich also um Fehler im Getriebe, nehme ich mal an.
Die Geschwindigkeit des Steppers anzupassen hat enorme Auswirkungen, bereits kleinste Änderung entscheiden zwischen fatalem Versagen und Erfolg.
(bei 2 Minuten Belichtung waren das 422 zu 416 Schritten, es lohnt sich hier eine größere Messreihe zu starten)
Der Einsatz von qdslrdashboard vereinfacht die Sache ungemein, da man direkt nach eine Belichtungsreihe die 100% Ansicht prüfen kann.
Eine Einkaufsliste, den Arduino code und weitere Bilder stelle ich im Lauf des Tages ein.
Alle Bilder mit 400mm/5,6 an D750
Sterne 103 sec f5,6
Mond 63 sec f?
Striche 123 sec f5,6
Anhänge
-
 Exif-Daten20160414-D75_7685.jpg107,8 KB · Aufrufe: 170
Exif-Daten20160414-D75_7685.jpg107,8 KB · Aufrufe: 170 -
 Exif-DatenD75_7691.jpg194 KB · Aufrufe: 169
Exif-DatenD75_7691.jpg194 KB · Aufrufe: 169 -
 Exif-Daten20160414-D75_7673.jpg163,7 KB · Aufrufe: 110
Exif-Daten20160414-D75_7673.jpg163,7 KB · Aufrufe: 110
Zuletzt bearbeitet:
Den Code für den Motorantrieb habe ich hier her:
http://www.instructables.com/id/BYJ48-Stepper-Motor/
Dort ist ein Kommentar von malijai
Der entscheidende Faktor ist FEEDTIME, dies ist die Wartezeit zwischen 2 Schritten während der Nachführung.
Diesen kann man recht einfach berechnen, wenn man den Radius der Konstruktion gemessen hat, feinjustieren muss man ihn später eh.
Leider kann man hier kein Excel anhängen...
Dies ist der (nicht optimierte, aber laufende) code für eine Version mit OLED Display, eine LED tuts aber ebenso gut.
http://www.instructables.com/id/BYJ48-Stepper-Motor/
Dort ist ein Kommentar von malijai
Der entscheidende Faktor ist FEEDTIME, dies ist die Wartezeit zwischen 2 Schritten während der Nachführung.
Diesen kann man recht einfach berechnen, wenn man den Radius der Konstruktion gemessen hat, feinjustieren muss man ihn später eh.
Leider kann man hier kein Excel anhängen...
Dies ist der (nicht optimierte, aber laufende) code für eine Version mit OLED Display, eine LED tuts aber ebenso gut.
PHP:
/*
BYJ48 Stepper motor code
Connect :
IN1 >> D8
IN2 >> D9
IN3 >> D10
IN4 >> D11
VCC ... 5V Prefer to use external 5V Source
Gnd
written By :Mohannad Rawashdeh
http://www.instructables.com/member/Mohannad+Rawashdeh/
28/9/2013
*/
//This library allows you to communicate with I2C / TWI devices.
//uses SDA, SDL for OLED
#include <Wire.h>
//OLED Bibliotheken
#include <Adafruit_GFX.h>
#include <Adafruit_SSD1306.h>
#define OLED_RESET 4 // not used / nicht genutzt bei diesem Display
Adafruit_SSD1306 display(OLED_RESET);
//hier die Pinbelegung vom Nano zum Treiber eintragen, WICHTIG sie müssen aufeinander folgen, siehe writestep()
#define IN1 8
#define IN2 9
#define IN3 10
#define IN4 11
//Eingang Pin vom Auslöser
const int buttonPinEnd = 2;
int buttonStateEnd = 0;
//maximal auszuführende Steps pro startbefehl
long NBSTEPS = 16433;
//Übergabewert für die Wartezeit zwischen den Steps
long STEPTIME;
//Dies ist die Wartezeit in millis() zwischen den Einzelschritten, dient zur Anpassung der Nachführgeschwindigkeit
long FEEDTIME = 289500;
//Schnellrücklauf Wartezeit in millis ()
long BACKTIME = 1000;
//bekommt die Geschwindigkeitsrampe zum Herausfahren des Spiels beim Start
long rampstep;
//Abfragewert ob ausreichend millis() vergangen sind um einen Schritt weiter zu gehen
unsigned long lastTime;
//index zum Durchtakten der 8 Schritte
int Step = 0;
//Drehrichtung vom Motor
boolean Clockwise = true;
//Die Arrays beinhalten die Schaltzustände der einzelnen Steps
int arrayDefault[4] = {LOW, LOW, LOW, LOW};
int stepsMatrix[8][4] = {
{LOW, LOW, LOW, HIGH},
{LOW, LOW, HIGH, HIGH},
{LOW, LOW, HIGH, LOW},
{LOW, HIGH, HIGH, LOW},
{LOW, HIGH, LOW, LOW},
{HIGH, HIGH, LOW, LOW},
{HIGH, LOW, LOW, LOW},
{HIGH, LOW, LOW, HIGH},
};
void setup() {
// initialize with the I2C addr 0x3C / mit I2C-Adresse 0x3c initialisieren
display.begin(SSD1306_SWITCHCAPVCC, 0x3C);
//Motortreiber Ausgang initialisieren
Serial.begin(9600);
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
pinMode(IN3, OUTPUT);
pinMode(IN4, OUTPUT);
// initialize the pushbutton pin as an input:
pinMode(buttonPinEnd, INPUT);
// internen Widerstand benutzen, es aendert sich das Schaltsignal beim Oeffner auf LOW als geschaltet
digitalWrite(buttonPinEnd, HIGH);
//Startbildschirm einmalig erzeugen
display.clearDisplay();
display.invertDisplay(false);
display.setTextColor(WHITE);
display.setTextSize(1);
display.setCursor(1,1);
display.println(" - Startracker 1.2 - ");
display.setTextSize(2);
display.setCursor(22,25);
display.println("STOPPED");
display.setTextSize(1);
display.setCursor(0,56);
display.println("Geile Bilders machen!");
display.display();
delay(100);
}
void loop() {
// read the state of the pushbutton value: delay zum Entprellen
delay(100);
buttonStateEnd = digitalRead(buttonPinEnd);
if (buttonStateEnd == LOW) {
delay(100); //nochmals entprellen
buttonStateEnd = digitalRead(buttonPinEnd);
if (buttonStateEnd == LOW) { //LOW = geschaltet
for (int j=0;j < 20; j++){ //pruefen ob der Knopf gedrückt gehalten wird
buttonStateEnd = digitalRead(buttonPinEnd);
if (buttonStateEnd == LOW) {
if (j == 19) { //Knopf wurde 20 Sekunden gedrückt gehalten, Rueckfahrtprogramm starten
Clockwise = true;
STEPTIME = BACKTIME; //zuweisen der Ruecklaufgeschwindigkeit
delay(100);
displayStatus(2); //Anzeige Rueckfahrt
delay(1000);
startengine(); //Motorbewegung starten
break;
}
delay(100);
}
else {
delay (100);
Clockwise = false; //vorwaerts
STEPTIME = FEEDTIME; //Nachfuergeschwindigkeit zuweisen
//Rampe berechnen
rampstep = (FEEDTIME - FEEDTIME/100)/20;
displayStatus(4);
NBSTEPS = 100;
STEPTIME = FEEDTIME/100;
startengine();
for (int k=0; k<20; k++){ //Rampe abfahren
STEPTIME = FEEDTIME / 100 + k * rampstep;
NBSTEPS = 1;
startengine();
}
//tracking starten
delay(100);
STEPTIME = FEEDTIME;
//Display Nachfuehrung anzeigen
displayStatus(1);
NBSTEPS = 20000;
startengine();
break;
}
}
}
}
}
void startengine(){
unsigned long currentMicros;
long stepsLeft = NBSTEPS; //Maximalschrittzahl festlegen
//so lange noch Schritte uebrig, fahre
while(stepsLeft > 0){
//aktuell Laufzeit speichern
currentMicros = micros();
//vergleichen mit der vergangenen Zeit seit dem letzten step, wenn limit erreich, abfahrt
if(currentMicros - lastTime >= STEPTIME){
//wird der Knopf gedrückt, wird angehalten
buttonStateEnd = digitalRead(buttonPinEnd);
if (buttonStateEnd == LOW) {
delay(100);
// Stop anzeigen
displayStatus(3);
delay (100);
return;
}
stepper();
lastTime = micros();
stepsLeft--;
}
}
stepsLeft = NBSTEPS;
}
//Schaltzustand fuer die Pins durchschalten
void writeStep(int outArray[4]){
for (int i=0;i < 4; i++){
digitalWrite(IN1 + i, outArray[i]);
}
}
//Schaltzustand dem Schritt zuweisen
void stepper(){
if ((Step >= 0) && (Step < 8)){
writeStep(stepsMatrix[Step]);
}else{
writeStep(arrayDefault);
}
setDirection();
}
//je nach Richtungswahl wird ein Schritt vorher oder spaeter aus dem array gesucht
void setDirection(){
(Clockwise) ? (Step++) : (Step--);
if(Step>7){
Step=0;
}else if(Step<0){
Step=7;
}
}
//Anzeigen Switch
void displayStatus(int z){
switch (z){
//Nachführen
case 1:
display.clearDisplay();
display.setTextColor(WHITE);
display.setTextSize(1);
display.setCursor(1,1);
display.println(" - Startracker 1.2 - ");
display.setTextSize(2);
display.setCursor(15,17);
display.println("tracking");
display.setCursor(23,35);
display.println("started");
display.setTextSize(1);
display.setCursor(14,56);
display.print("steptime: ");
display.println(STEPTIME);
display.display();
break;
//schnellrücklauf
case 2:
display.clearDisplay();
display.setTextColor(WHITE);
display.setTextSize(1);
display.setCursor(1,1);
display.println(" - Startracker 1.2 - ");
display.setTextSize(2);
display.setCursor(25,25);
display.println("rewind");
display.setTextSize(1);
display.setCursor(14,56);
display.print("steptime: ");
display.println(STEPTIME);
display.display();
break;
//Motor stoppen
case 3:
display.clearDisplay();
display.setTextColor(WHITE);
display.setTextSize(1);
display.setCursor(1,1);
display.println(" - Startracker 1.2 - ");
display.setTextSize(2);
display.setCursor(22,25);
display.println("STOPPED");
display.setTextSize(1);
display.setCursor(20,56);
display.println("- RAUCHPAUSE! -");
display.display();
break;
//ramp up
case 4:
display.clearDisplay();
display.setTextColor(WHITE);
display.setTextSize(1);
display.setCursor(1,1);
display.println(" - Startracker 1.2 - ");
display.setTextSize(2);
display.setCursor(22,25);
display.println("RAMP UP");
display.setTextSize(1);
display.setCursor(20,56);
display.println("- ruhig Blut! -");
display.display();
break;
}
}
Zuletzt bearbeitet:
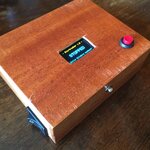
Einkaufsliste für die Elektronik
- Arduino Nano V3
- Stepper 28BYJ-48
- 0,96 Zoll OLED Display I²C mit 128×64 Pixel mit 4 pins
- Kippschalter an/aus Stromversorgung
- Taster
- Kabel Stromversorgung 2adrig
- evtl. 9V Anschlußkabel
- evtl. 4-8fach AA Halter mit "9V Klemmen"
- 2fach Kabel Motortreiber zu Strom
- 4fach Kabel Motortreiber zu Nano
- 4fach Kabel OLED zu Nano
- 2fach Kabel Strom zu Nano
- 2fach Kabel Nano zu Taster
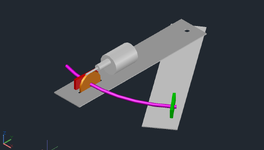
Anbei das (miserable) Schaltbild des Antriebs, ich kriegs nicht hin den richtigen Motortreiber dort einzubauen, man denke sich den beim stepper mitgelieferten Treiber, die Anschlüsse sind eindeutig markiert mit IN1-IN4, + und - (schlecht zu erkennen, aber vorhanden)
Ich betreibe den Antrieb mit 4 AA Zellen, das hält ein paar Stunden.
- Arduino Nano V3
- Stepper 28BYJ-48
- 0,96 Zoll OLED Display I²C mit 128×64 Pixel mit 4 pins
- Kippschalter an/aus Stromversorgung
- Taster
- Kabel Stromversorgung 2adrig
- evtl. 9V Anschlußkabel
- evtl. 4-8fach AA Halter mit "9V Klemmen"
- 2fach Kabel Motortreiber zu Strom
- 4fach Kabel Motortreiber zu Nano
- 4fach Kabel OLED zu Nano
- 2fach Kabel Strom zu Nano
- 2fach Kabel Nano zu Taster
Anbei das (miserable) Schaltbild des Antriebs, ich kriegs nicht hin den richtigen Motortreiber dort einzubauen, man denke sich den beim stepper mitgelieferten Treiber, die Anschlüsse sind eindeutig markiert mit IN1-IN4, + und - (schlecht zu erkennen, aber vorhanden)
Ich betreibe den Antrieb mit 4 AA Zellen, das hält ein paar Stunden.
Anhänge
-
 Exif-DatenIMG_1601.jpg193,3 KB · Aufrufe: 80
Exif-DatenIMG_1601.jpg193,3 KB · Aufrufe: 80 -
 Exif-DatenIMG_1602.jpg168,5 KB · Aufrufe: 93
Exif-DatenIMG_1602.jpg168,5 KB · Aufrufe: 93 -
 Exif-DatenIMG_1604.jpg95,8 KB · Aufrufe: 59
Exif-DatenIMG_1604.jpg95,8 KB · Aufrufe: 59 -
 Exif-Datenoledtracker_Steckplatine.jpg165,6 KB · Aufrufe: 133
Exif-Datenoledtracker_Steckplatine.jpg165,6 KB · Aufrufe: 133
So hier mal der erste richtige Test mit 24mm an der 6D. ...
Ein Klasse Bild, es erinntert mich iwie an den Standart BG von Apple xD
MIt Welcher Blende hattest du hier fotografiert.
Und wie hast du die Bilder dann zusammen gearbeitet, die EBV würde mich da auch sehr interessieren.
Vielen dank schon mal für den Thread, er ist echt sehr interessant.
Zuletzt bearbeitet von einem Moderator:
Ich habe auf Fehmarn, bei bestem Himmel, noch ein wenig mit der Billignachführung gespielt und kalibriert.
Ich stoße jedoch absolut an die Grenzen der Genauigkeit.
Ich habe vor allem den Getriebemotor im Verdacht, diesen werde ich in der kommenden Woche gegen einen Nema 17 mit 0,9° austauschen, sonst alles identisch lassen.
Sicher wiederholbar kann ich mit 135mm an Kleinbild 30 Sekunden lang belichten. Ich kann auch auf 1-2min hoch gehen, dann wird der Ausschuß aber recht hoch. Interessanterweise ist der Ausschuß bei 2 min geringer als bei 1 min ...
Anbei ein Bild von M31, ich glaube das waren 10 lights, keine darks, flats, bias (natürlich wieder vergessen bei den Testreihen). 135/2, 30 Sek, ISO3200 an D750. gestacked in fitswork, mit DSS komme ich nicht klar.
Mich würde nochmal interessieren auf welche Genauigkeiten ihr mit Euren Selbstbauten kommt?
Wieviel mm KB Äquivalent bei wieviel Sekunden Belichtungszeit schafft ihr sicher und zuverlässig?
Ist der Selbstbau mobil oder fest montiert?

Ich stoße jedoch absolut an die Grenzen der Genauigkeit.
Ich habe vor allem den Getriebemotor im Verdacht, diesen werde ich in der kommenden Woche gegen einen Nema 17 mit 0,9° austauschen, sonst alles identisch lassen.
Sicher wiederholbar kann ich mit 135mm an Kleinbild 30 Sekunden lang belichten. Ich kann auch auf 1-2min hoch gehen, dann wird der Ausschuß aber recht hoch. Interessanterweise ist der Ausschuß bei 2 min geringer als bei 1 min ...
Anbei ein Bild von M31, ich glaube das waren 10 lights, keine darks, flats, bias (natürlich wieder vergessen bei den Testreihen). 135/2, 30 Sek, ISO3200 an D750. gestacked in fitswork, mit DSS komme ich nicht klar.
Mich würde nochmal interessieren auf welche Genauigkeiten ihr mit Euren Selbstbauten kommt?
Wieviel mm KB Äquivalent bei wieviel Sekunden Belichtungszeit schafft ihr sicher und zuverlässig?
Ist der Selbstbau mobil oder fest montiert?
Hallo Huegenbegger,
ich habe mir von einigen Jahren eine Tangentialnachführung gebaut (siehe z.B. hier http://www.astrotreff.de/upload/stephan_bock/20120612/2011-02-28_212708_rs.jpg)
Damit komme ich regelmäßig bei 450mm KB Äquivalent auf ca 60s. Polnah sogar auf 90-120s.
Bei meiner 500er Russentonne (750mm KB Äquivalent) kann ich meist so 60s erreichen, jedoch ist dann oft der Wind der begrenzende Faktor weil ich vom Stativ aus fotografiere (also nicht fest installiert). Zudem führt die Massenverlagerung bei der Drehung in Verbindung mit der Elastizität von Stativ, Kopf und Nachführung dazu, dass die Ausrichtung nach ca. 1 h schlechter wird.
Beispielbild von M81+M82 siehe hier http://www.astrotreff.de/topic.asp?TOPIC_ID=199376
ich habe mir von einigen Jahren eine Tangentialnachführung gebaut (siehe z.B. hier http://www.astrotreff.de/upload/stephan_bock/20120612/2011-02-28_212708_rs.jpg)
Damit komme ich regelmäßig bei 450mm KB Äquivalent auf ca 60s. Polnah sogar auf 90-120s.
Bei meiner 500er Russentonne (750mm KB Äquivalent) kann ich meist so 60s erreichen, jedoch ist dann oft der Wind der begrenzende Faktor weil ich vom Stativ aus fotografiere (also nicht fest installiert). Zudem führt die Massenverlagerung bei der Drehung in Verbindung mit der Elastizität von Stativ, Kopf und Nachführung dazu, dass die Ausrichtung nach ca. 1 h schlechter wird.
Beispielbild von M81+M82 siehe hier http://www.astrotreff.de/topic.asp?TOPIC_ID=199376
Hallo Huegenbegger,
ich habe mir von einigen Jahren eine Tangentialnachführung gebaut (siehe z.B. hier http://www.astrotreff.de/upload/stephan_bock/20120612/2011-02-28_212708_rs.jpg)
Damit komme ich regelmäßig bei 450mm KB Äquivalent auf ca 60s. Polnah sogar auf 90-120s.
Moin Stephan,
vielen Dank für Deine Rückmeldung!
Witzig auch daß gerade Du Dich hier meldest, dann bei allen meinen Recherchen komme ich immer wieder auf Deine Nachführung zurück.
Das Konzept gefällt mir einfach am besten.
Welche Trapezspindel hast Du verbaut, TR8x1,5?
Dein Konzept werde ich auf jeden Fall als nächstes umsetzen, ein bischen größer und massiver, ist dann nur noch mit dem Auto zu transportieren, aber das ist ok.
Ich habe inzwischen mehrere Tests gefahren um die Hauptfehler zu finden.
- die Zahnstange und/oder das Zahnrad von Conrad sind unter aller Sau gefertigt, jeder einzelne Zahn erzeugt einen Bogen, das konnte man bei Verwendung des NEMA 17 Steppers klar erkennen.
- Tausch auf einen aufgeklebten GT2 Riemen bringt schon deutliche Erfolge, wie gut muss sich noch zeigen, der Himmel war in den letzten Tagen zu bewölkt, so daß ich nur verwaschene Strichspuren bei sehr langen Belichtungen erhalten habe
- Der Polsucher hat sich wohl bei einem der zahlreichen Transporte in letzter Zeit verstellt. Die Aufnahme am Extra Arm ist mässig gut, schon minimales Spiel machts zum Glücksspiel. Ich werde ihn jetzt direkt auf dem Nachführarm mit montieren.
Trotz schlecht ausgerichtetem Polsucher und noch nicht kalibrierter Geschwindigkeit konnte ich bereits recht wiederholbar 30 Sekunden an 300mm auf APSC fotografieren, hoffe aber auf mehr.
- wie kalibriert ihr die Geschwindigkeit?
Ich dachte an folgendes:
1) Foto ohne Nachführung über 10-15 min - Ausmessen der Strichlänge in Pixel in PS (zB 2000Pixel in 10min)
2) Foto ohne oder mit Nachführung, ISO voll hoch, Belichtungszeit voll runter, es muss nur ein Referenzstern sichtbar sein als Startpunkt
3) Foto mit Nachführung vom den Referenzstern über 10-15 min - Ausmessen der Strichlänge in Pixel
4) Vergleich Referenzstern Bild 2 mit 3, nun kann ich erkennen ob die Nachführung zu langsam oder zu schnell ist. Ist sie zu schnell werden die Pixel gemessen und auf die Pixel ohne Nachführung addiert, und anders herum. Ein einfacher Dreisatz sagt mir dann wie ich meine Geschwindigkeit ändern muss.
(steptime ist die Wartezeit in micros zwischen den Einzelschritten: (Pixel mit NF)/(Pixel ohne NF) * steptime = notwendige steptime )
Hallo Huegenbegger,
ja, ich habe eine 8x1.5 verbaut die ich aus dem Internet bestellt habe. Damit ist die Genauigkeit gegenüber einer Gewindestange massiv nach oben gegangen. Getriebe habe ich ebenfalls eliminiert (weitere Fehlerquelle), ich nutze einen Schrittmotor mit 1.8° pro Schritt im Halbschrittbetrieb. Das ist gut genug selbst für lange Brennweiten.
Im Keller habe ich mir zudem einen Referenz-Stern programmiert, genauer gesagt einen Pixel der über den sonst schwarzen Schirm meines Laptops läuft. Das ist reproduzierbar, nicht so kalt wie draußen und kann eben auch deutlich schneller laufen als ein Stern... wenn dann noch die Nachführung ebenfalls beschleunigt läuft, dann kannst Du viele Messungen in kurzer Zeit durchführen.
Auf diese Weise habe ich den verbleibenden (sehr kleinen) Gewindefehler ausgemessen und konnte ihn nochmal reduzieren, da er bei jeder Umdrehung etwa gleich auftritt. Damit kann man den direkt im Code der Motorsteuerung kompensieren (also pro Umdrehung am Anfang ein bisschen schneller und am Ende ein bisschen langsamer laufen lassen - oder eben umgekehrt).
Ich weiss, klingt verrückt - aber wenn es draussen regnet, dann kommt man auf solche Gedanken
Um die Winkelgeschwindigkeit bei einer geraden Gewindestange konstant zu halten, muss man aber die Umdrehungsgeschwindigkeit des Motors ebenfalls anpassen. Bei kleinen Winkeln (sinus a=a) fällt das nicht ins Gewicht, aber so ab 10° wird es schon sichtbar. Ist aber auch kein Problem wenn Du einen µC oder dgl. verwendest.
Halte uns auf dem Laufenden über Deine Fortschritte. Vielleicht liest ja noch jemand mit der auch Lust aufs Basteln hat.
Gruß
Stephan
ja, ich habe eine 8x1.5 verbaut die ich aus dem Internet bestellt habe. Damit ist die Genauigkeit gegenüber einer Gewindestange massiv nach oben gegangen. Getriebe habe ich ebenfalls eliminiert (weitere Fehlerquelle), ich nutze einen Schrittmotor mit 1.8° pro Schritt im Halbschrittbetrieb. Das ist gut genug selbst für lange Brennweiten.
Im Keller habe ich mir zudem einen Referenz-Stern programmiert, genauer gesagt einen Pixel der über den sonst schwarzen Schirm meines Laptops läuft. Das ist reproduzierbar, nicht so kalt wie draußen und kann eben auch deutlich schneller laufen als ein Stern... wenn dann noch die Nachführung ebenfalls beschleunigt läuft, dann kannst Du viele Messungen in kurzer Zeit durchführen.
Auf diese Weise habe ich den verbleibenden (sehr kleinen) Gewindefehler ausgemessen und konnte ihn nochmal reduzieren, da er bei jeder Umdrehung etwa gleich auftritt. Damit kann man den direkt im Code der Motorsteuerung kompensieren (also pro Umdrehung am Anfang ein bisschen schneller und am Ende ein bisschen langsamer laufen lassen - oder eben umgekehrt).
Ich weiss, klingt verrückt - aber wenn es draussen regnet, dann kommt man auf solche Gedanken
Um die Winkelgeschwindigkeit bei einer geraden Gewindestange konstant zu halten, muss man aber die Umdrehungsgeschwindigkeit des Motors ebenfalls anpassen. Bei kleinen Winkeln (sinus a=a) fällt das nicht ins Gewicht, aber so ab 10° wird es schon sichtbar. Ist aber auch kein Problem wenn Du einen µC oder dgl. verwendest.
Halte uns auf dem Laufenden über Deine Fortschritte. Vielleicht liest ja noch jemand mit der auch Lust aufs Basteln hat.
Gruß
Stephan
Hallo Stephan,
Die Idee mit dem Pixel ist super, ich war schon dabei einen Laserpointer zu steuern und an die Wand zu projizieren, aber ich hoffe mal dass die Pixel deutlich genauer sind, werde das auch so realisieren
Die Anpassung der Geschwindigkeit abhängig vom Öffnungswinkel habe ich bereits vorbereitet, ist zum Glück ja nur Mathe.
Die Kompensation des Gewindefehlers ist genial!
Nun, dann werde ich mich mal an die Konstruktion der neuen Vorrichtung machen.
Parallel optimiere ich aber noch meine kleine, sie ist wirklich sehr praktisch unterwegs, da sie in einen Rucksack passt, mit AA Batterien betrieben wird und für Milchstrasse und M31 völlig ausreicht.
Ich versuche verzweifelt die Software "dslr logger" zur Polausrichtung zu bekommen. Leider wird meine Anfrage für die Astrotrac yahoo group ignoriert und ich finde keine Quelle...
Hat das vlt jemand für mich?
Die Idee mit dem Pixel ist super, ich war schon dabei einen Laserpointer zu steuern und an die Wand zu projizieren, aber ich hoffe mal dass die Pixel deutlich genauer sind, werde das auch so realisieren
Die Anpassung der Geschwindigkeit abhängig vom Öffnungswinkel habe ich bereits vorbereitet, ist zum Glück ja nur Mathe.
Die Kompensation des Gewindefehlers ist genial!
Nun, dann werde ich mich mal an die Konstruktion der neuen Vorrichtung machen.
Parallel optimiere ich aber noch meine kleine, sie ist wirklich sehr praktisch unterwegs, da sie in einen Rucksack passt, mit AA Batterien betrieben wird und für Milchstrasse und M31 völlig ausreicht.
Ich versuche verzweifelt die Software "dslr logger" zur Polausrichtung zu bekommen. Leider wird meine Anfrage für die Astrotrac yahoo group ignoriert und ich finde keine Quelle...
Hat das vlt jemand für mich?
Habe Dir eine PN geschrieben.
Teilen:
WERBUNG